According to a report by the Hong Kong-based South China Morning Post on May 30th, a research team from the northwest region of China has recently developed a new algorithm. This algorithm has the potential to fundamentally change the way drones are used to search for and destroy enemy targets.
This algorithm, known as HG-STR (Isometric Spatiotemporal Reasoning Decision Method), has the potential to enable fixed-wing drone formations to autonomously search for and eliminate every enemy target, even when their communication signals are disrupted or their line of sight is blocked, on a vast battlefield.
According to a peer-reviewed paper published on May 19th, under specific experimental simulation conditions, the HG-STR achieved a coverage rate of 100%. This metric is significantly better than that of the comparative algorithm. The Nanyang Post reported that the algorithms operating speed was sufficient to keep up with the fast pace of modern warfare.
The report also cited a Chinese defense expert who requested anonymity. According to this expert, most drone operations are still controlled remotely by human pilots. The expert said, This technology foreshadows a future where groups of drones will be deployed into high-risk, heavily contested environments. Once they are completely disconnected from human command, they can operate independently, guided solely by a single command: Search and destroy all enemies.
Researchers emphasize that the scenarios described in the paper are merely typical simulation scenarios set up by the team based on algorithmic research needs. The purpose of these scenarios is to test the algorithms performance under conditions where local observation and communication are limited. It should not be claimed that this technology has already been ready for actual deployment.

UAV Cluster – Information Image
According to reports, traditional algorithms often treat all types of informationsuch as friendly forces, enemy forces, and terrainas the same type of data. However, this latest paper argues that such processing methods often lead to confusion in the interpretation of information.
The new method proposed in the paper involves creating a heterograph, which is a network capable of assigning meaningful semantics to different objects. In this network, friendly drones represent one type of node, search areas represent another type of node, while enemy targets represent a completely different type of node.
This algorithm can accurately identify and recognize the correct relationships between various objects through learning. When a drone detects an enemy target, this information is classified as a high-priority threat by the system. Conversely, when friendly units are nearby, the system considers this as an opportunity for coordinated combat operations.
The paper indicates that, thanks to this system, drone clusters can instantly determine when to provide support to friendly forces, and when to take action against enemy forces.
In contrast, those old-fashioned systems based on established rules operate in a manner similar to pre-written scripts. Once the opponent does not follow these scripts, these systems become completely ineffective. Most existing optimization methods work like chess computers that analyze every move one by one; however, their processing speed is too slow.
The paper indicates that, thanks to end-to-end neural network forward reasoning, the single-step time for HG-STR is only 6.6 milliseconds. This means that decisions can be made in just 6.6 milliseconds, which represents a significant improvement compared to traditional methods.
Using another method, GA+PSO+MPC, it can be seen that although this method has a slightly higher coverage rate compared to HG-STR, its downside is a significant computational delay of up to 5.8 seconds. At a flight speed of 100 meters per second, this means that there is a blind flying distance of nearly 600 meters between each decision-making step. This is extremely dangerous in a situation where strong electronic countermeasures are present.
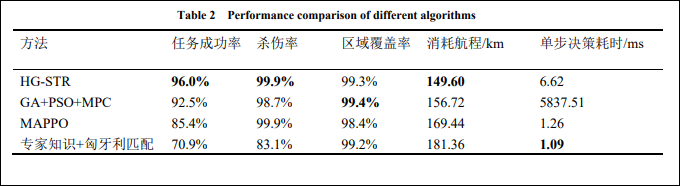
Comparison of Performance of Different Algorithms – Screenshot from the paper
However, the real battlefield is full of uncertainties. Enemy electronic interference could cut off communication links, leaving drones isolated from other drones. The range that drones sensors can detect on the ground is also very limited. Moreover, the Search and Destroy mission itself is a race against time and fuel consumption.
This Chinese research team from China faced these challenges and proposed corresponding solutions. First, they installed a memory system on each drone. Once the drone loses contact with its friendly drones, it can use a special memory modulethe Gate Control Unit (GRU)to trace and remember the last location of its friendly drones, as well as the coordinates where the enemy targets appeared for the last time.
Secondly, they have designed a hierarchical brain decision-making mechanism for drones. First, the drone determines its overall mission objective: Should it continue searching, or switch to attack mode? Next, it selects a specific target for attack. Finally, it decides how much ammunition to use in order to carry out the attack based on the actual situation.
By breaking down complex decision-making problems into progressively more manageable sub-tasks, drones successfully avoid getting bogged down in chaos when trying to handle everything at once.
In the simulation experiments conducted by this team, even under conditions of extremely limited communication range and weak connectivity, a task success rate of 94% was still achieved.
The experimental results also show that this algorithm possesses extremely strong generalization capabilities. It can be seamlessly transferred and applied to larger-scale combat scenarios involving more drones and enemy targets, without the need for any additional training. Training is only required in small-scale simulation environments.
Looking to the future, the team plans to bring this algorithm from the laboratory environment into real-world battlefield applications. Additionally, they will work towards improving the algorithms robustnessthat is, its ability to handle interference and errors effectively. This will enable the algorithm to not only properly handle sudden communication interruptions, but also effectively address various complex issues such as information transmission delays and data corruption.
The research report states: Future work will focus on exploring the lightweight deployment and practical testing of this algorithm on embedded airborne platforms with limited computing power. Additionally, efforts will be made to incorporate factors such as channel competition, random packet loss, and transmission delays into the Markov decision state space. The study will also investigate the resilience of clusters under non-ideal communication channels.
